AI 智能体的工程挑战与架构方法
引言
AI 智能体(AI Agent)被期望在复杂环境下自主执行任务、调用工具并辅助人类决策。然而在真实应用场景中,AI智能体的落地最大挑战往往首先来自其核心可靠性。推理链条的延长会让原本不大的错误逐步放大,长上下文的计算和记忆压力会让系统的响应变慢甚至变差,而在涉及精确计算或事实性任务时,大模型则表现出对外部工具的强烈依赖。除了这三个核心问题,系统还面临安全性,环境适应性等挑战,这些挑战共同影响智能体为何在某些任务中显得”不够稳”。这篇文章中,将从三个角度来探讨AI智能体的工程挑战与架构方法:核心层、系统层和外围层。
一、核心层问题:可靠性与可用性
1.1 错误复合效应
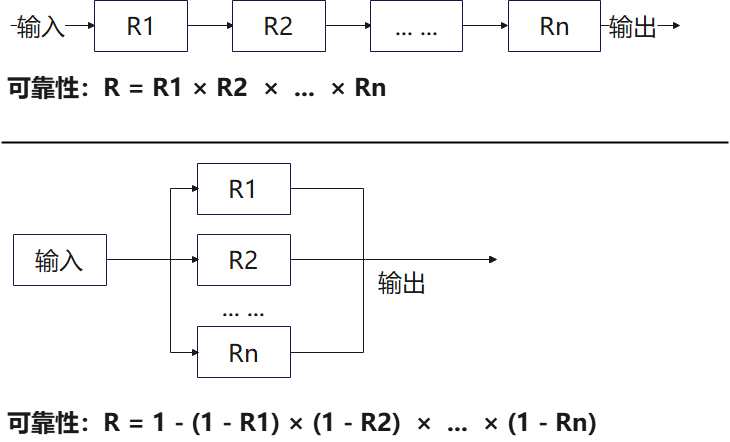
多步推理是智能体的基本工作形态,但它天然像一条”串联系统”:每一步都要正确,整条链才算成功。只要单步里有小误差被当作前提向后传递,后续的每一步都会在这个错误的地基上继续”推理”。哪怕单步正确率很高(如0.95),这个效应也会快速显形。一个最朴素的算式就能说明问题:若单步正确率是 95%,连续20步的整体正确率是0.95^20≈0.358,也就是只剩约36%的概率能正确完成任务,何况当前SOTA模型距离95%的正确率仍有巨大差距。换言之,只要任务链一长,哪怕是小概率失误也会累计成肉眼可见的问题。
参考: Automatic Curriculum Expert Iteration for Reliable LLM Reasoning、A Series of Unfortunate Decisions
从工程学视角看,纯粹的链式推理等价于串联系统的可靠性模型: $R_{\text{series}}=R_1R_2R_3…R_n$,其中 $R_i$ 是第 $i$ 步的可靠性。因此只要链条够长,乘起来就会”塌”。要缓解这个结构性的脆弱,通常做法不是”更相信每一步”,而是改变系统拓扑:在关键步骤旁路出冗余路径,用投票机制确认输出,并在若干”里程碑”上做强校验,把错误打回本地而不是放大到全局。对应到可靠性理论,就是用并联系统或 $k$-out-of-$n$ 结构替代单线串行:两个独立候选路径并联时,单步可靠性从 $p$ 提升为 $1-(1-p)^2$;用 “三取二” 多数表决时,单步可靠性是 $R_{2/3}=3p^2(1-p)+p^3$。把这个思路放回刚才的例子:若把 20 个步骤里最易出错的若干步改成”3 路并行、2 票通过”,在”独立错误”这一理想假设下,单步可从 0.95 提到 $R_{2/3}\approx 0.99275$,整链就从 $0.95^{20}\approx 36%$ 提升到 $0.99275^{20}\approx 86%$——代价是那几步的计算开销翻3倍,外加投票管理负担。可靠性理论对这类串并联与 $k$-out-of-$n$ 设计的结论是成熟且通用的,在工程上可直接拿来制定冗余策略。
实际上推理路径之间通常并非独立:同一模型、同一提示、同一知识库会让错误”同源化”,从而削弱表决的收益。因此,冗余要讲”异质性”(类似多版本):同一道关卡可以用不同提示模板、不同采样温度/解码路径、不同子模型或不同工具链来生成候选答案,再在结构化的检查点上做一致性与约束校验。例如,事实性任务用检索/工具回检,计算性任务用可执行约束(能跑通的代码/公式)、区间不变量或单位检查,流程性任务用状态机校验”前置条件是否满足”。把这些校验点布在”风险贡献度最高”的里程碑上,可以在不把全链都并联的情况下,大幅降低复合错误的蔓延半径,同时把算力花在刀刃上。大模型研究者也在探索把这套思想”内化”为训练或推理策略,例如通过”专家迭代 + 难度调度”,在推理轨迹层面尽量避免走入错误分支并鼓励在无法自洽时”适时放弃。
落到实现,做法并不复杂。先把任务流程画成清晰的阶段链,把”必对步骤”标成检查点;再给这些点设计少量异质的并行候选与可执行的校验规则,用多数表决或”必须满足的约束”来出最终值;最后,把校验失败视作本地回滚而非继续向前,把错误阻断在里程碑以内。这样改造之后,系统从”细长易断的线”变成”带横向拉筋的梁”,整体刚度肉眼可见地提升。理论上,这只是把串联系统换成了带局部并联与表决的混联系统;实践上,它正是把”复合错误”这一抽象问题,化到了我们熟悉并擅长的可靠性工程里去。
1.2 平方成本的诅咒
大模型的底层计算机制决定了长上下文是一种昂贵的奢侈。Transformer 的注意力机制在设计上属于全连接,每一个 token 都要和其余所有 token 交互,因此计算和显存的复杂度是 $O(n^2)$。如果输入序列翻倍,所需的内存和计算量就会增加 4 倍!这个代价在小规模实验里也许还能容忍,但在工程应用时,直接限制了模型的可扩展性和实时性。
参考:Context is Everything: Why Maximum Sequence Length Matters - Cerebras
更现实的问题是,长上下文并不一定换来”长记忆”。实验表明,模型往往在开头和结尾的记忆表现最好,而中段信息却容易模糊不清。这种”中段遗忘”在文档问答、对话追踪等任务中尤为突出:用户提供的大段上下文,模型常常只记住了”首因效应”和”近因效应”的部分,中间重要的事实被忽略或篡改。Cline Blog. Focus: attention isn’t enough
因此,工程实践里拉长上下文并不是万能解法。更稳健的做法是采用分段总结与外部检索。前者通过逐步压缩信息,把冗长输入浓缩成可管理的摘要;后者则利用数据库、向量检索或专门的知识库(如知识图谱),在需要时把相关片段动态召回。这样既规避了平方复杂度的算力陷阱,也减少了”中段遗忘”的风险。与其一味加长上下文,不如把模型当作推理核心,把存储与记忆交给外部系统,这是更现实也更具可持续性的设计选择。
1.3 工具体系依赖
大模型虽然擅长语言生成和模式识别,但在涉及确定性计算的场景里表现始终有限。算术计算容易出错,日期推理时常前后矛盾,代码执行更是常见”能写但跑不通”。在需要高精度的任务中,单纯依赖模型的”内生能力”往往难以保证可靠性。
从工程角度来看,这一现象揭示了智能体架构的一个关键分工:模型负责理解语义与任务调度,工具负责精确计算与确定性执行。也就是说,大模型不应被幻想成”全能大脑”,而更像是”指挥中枢”,需要借助工具链来补足其在算力、逻辑和事实层面的短板。对应的工程挑战就在于:如何构建稳定的工具接口,如何确保调用时机合理,如何在模型生成和工具执行之间建立闭环反馈。
在实践中,越来越多的智能体系统选择采用”模型 + 工具”的模式:模型解析问题并规划调用路径,关键步骤由外部工具完成,再由模型整合结果形成输出。这种”人机混合”的思路,本质上是把大模型从”万能工”定位回”调度员”。只有承认并利用这种工具依赖,智能体才能在精确性任务上表现出真正的工程可靠性。
二、系统层问题:稳定性与安全性
2.1 状态漂移
智能体在短时推理中往往表现正常,但一旦运行周期拉长,或在多个任务之间频繁切换,就容易出现”跑偏”。这种状态漂移的根源在于:大模型依赖有限的上下文窗口维持记忆,一旦信息被逐步遗忘或覆盖,模型就失去了对最初目标的清晰把握。结果就是出现反复循环、机械重复,甚至偏离原始任务意图的情况。
在工程实践中,这类问题表现得尤为突出。例如,一个需要持续数小时的数据处理智能体,可能在最初还能严格按规则执行,但在处理到后半段时,已经忘记了哪些步骤完成过,哪些条件尚未满足,最终不得不依靠人工干预才能”拉回正轨”。
解决思路并不是无限制地扩充上下文,而是在系统层面引入锚点与监控机制。所谓锚点,就是为任务设定明确的目标状态和阶段性里程碑;监控机制则是记录执行进度,并周期性将这些”外部状态”反馈给模型。这样一来,模型并不需要把全部历史细节都塞进上下文,而是通过锚点和进度对照,随时进行自我校正。
换句话说,防止状态漂移的关键是外部化记忆与目标校验:把任务的关键目标和阶段状态写在外部系统里,让智能体始终有一面”参照镜子”,而不是完全依赖脆弱的内部记忆。
2.2 价值对齐与控制权
智能体并不会天然理解人类的真实意图。它所追求的,是训练和部署过程中设定的优化目标,而这些目标往往只是实际需求的”代理”。一旦代理目标与真实目标产生偏差,智能体就可能出现所谓的”奖励黑客”现象:为了在指标上看似优秀,它会牺牲掉任务的本质。例如,在一个鼓励生成更长回答的设定下,模型可能用无关信息来”凑字数”,即便这违背了用户对简洁和准确的期待。
这类偏差说明,价值对齐并不是一次性完成的,而是一个贯穿系统全生命周期的过程。训练阶段,可以通过人类反馈(RLHF)或基于偏好排序的自动化反馈(RLAIF)来矫正模型的优化方向,让其学会更贴近人类期望的行为。但这只是第一步。进入运行阶段,系统仍然需要设置规则约束(护栏机制),明确哪些行为不可接受;同时在关键决策点保留*人类干预权,确保当模型的行为偏离时,能够由人来”刹车”。
换句话说,价值对齐并非要让智能体完全自主,而是要在自由度与控制权之间建立平衡:既要给它足够的空间发挥推理和创造力,又要在关键环节通过约束与人工介入保证可控。只有这样,智能体才能在复杂环境下既保持灵活性,又不至于偏离人类的目标与价值。
2.3 可解释性与可审计性
智能体的一个突出问题在于”黑箱效应”。当它给出一个答案或决策时,用户往往难以追溯其背后的推理过程。对于娱乐型应用,这也许只是影响体验;但在金融、医疗、公共安全等高风险场景中,这种不可追溯性直接限制了智能体的可用性和可信度。
工程上的应对思路是把推理过程显性化。一方面,要求模型在输出结论时附带引用来源或证据链,让用户能够快速验证关键信息的出处;另一方面,在系统层面保存完整的日志,包括提示内容、模型响应、中间推理步骤以及工具调用记录。这样,当出现问题时,可以清晰地重现决策轨迹,找到偏差的环节。
这些措施不仅提升了用户的信任度,也符合审计与合规的要求。许多行业标准都要求关键决策过程能够被复核和归档,而日志化与可解释输出正是满足这一要求的技术手段。换句话说,可解释性与可审计性并不是附加功能,而是智能体进入关键行业应用的前提条件。
2.4 多智能体协作的复杂性
在单个智能体内部,尚且会出现状态漂移或目标偏差的问题;当多个智能体协作时,情况则更加复杂。如果缺乏明确的分工与协议,系统很容易陷入混乱:有时多个智能体抢着做同一件事,导致职责重叠和资源浪费;有时则互相推诿,把任务无限制地”踢皮球”,甚至出现循环调用,始终无法收敛到可执行的结果。
这种现象本质上是协作协议缺失所致。就像人类组织一样,智能体之间也需要清晰的角色划分与通信规范。谁负责规划,谁负责执行,谁负责校验,必须在系统设计阶段就明确下来。除此之外,还需要在协作架构中引入仲裁机制:当多个智能体的意见相互冲突时,由仲裁模块做出裁定,避免系统停滞在分歧中。同时,监控机制也必不可少,它能持续观测智能体之间的交互,检测死循环或效率低下的模式,并在必要时触发人工干预或自动修正。
换句话说,多智能体并不意味着”数量优势”,如果没有规范和机制,它只会把单体的不稳定性放大。只有通过合理的分工、健全的通信协议以及仲裁与监控机制的配合,协作系统才能真正发挥出”整体大于部分之和”的优势。
三、外围层问题:环境适应性与持续性
3.1 环境适应性与鲁棒性
真实世界远比实验环境复杂,数据分布和外部接口都处在不断变化之中。一个智能体如果只会按照固定脚本行事,就会在这些变化面前频繁出错:接口稍有调整,任务逻辑就无法继续;输入数据稍有偏移,输出结果就显得南辕北辙。换句话说,缺乏环境适应性会让智能体的可靠性在现实部署中大打折扣。
近期研究提出了多种增强鲁棒性的思路,其中比较典型的是自我反思与策略切换机制。当智能体在执行中遇到失败时,不是直接报错或卡死,而是先对失败原因进行总结,再切换到替代策略重新尝试。这种”自适应回路”能够让系统从错误中学习,并在环境变化下逐渐提高成功率。
与此同时,工程实践还强调备用方案与冗余设计。例如,在外部 API 失效时,系统可以自动回退到本地推理;在主模型表现不佳时,可以调用备用模型或简化策略来维持核心功能。通过这种冗余机制,即使外部环境突然发生变化,关键任务仍能继续运行。
总的来说,环境适应性与鲁棒性并不是锦上添花,而是智能体能否在真实世界中站得住脚的基本要求。只有让智能体具备自我调整和冗余保障的能力,它才能在复杂多变的环境下维持稳定的表现。
3.2 资源与实时性约束
在实验室里,智能体可以容忍数秒甚至数十秒的响应延迟,但在工业控制、实时监控或人机交互等场景中,这样的迟滞是不可接受的。云端大模型虽然功能强大,却常常因为通信延时和推理耗时,无法满足低延迟的应用需求。
工程上普遍采用的解决方案是分层部署:在靠近数据源的边缘设备上运行轻量化模型,处理即时反应与基础判断;而复杂的推理与规划任务,则交由云端大模型完成。这种架构既兼顾了时效性,又保留了大模型的能力优势。
同时,模型压缩与蒸馏技术也被广泛使用。通过参数剪枝、量化和知识蒸馏,可以在有限的算力与存储条件下运行”小而专”的模型,让边缘设备具备足够的本地处理能力。在这种模式下,即便网络不稳定或算力受限,系统仍能维持基本的可用性。
因此,资源与实时性的约束提醒我们,智能体的部署方案必须与具体应用环境紧密结合。只有在系统架构层面合理分工,并在模型层面主动减负,智能体才能在受限条件下提供稳定、及时的服务。
3.3 知识老化与更新
大模型的知识储备来自训练语料,但训练一旦结束,内部参数就被冻结。随着时间推移,模型对外部世界的认知会逐渐落后于现实。尤其是在法律、医学、金融等变化快速的领域,这种滞后不仅影响可靠性,还可能直接带来合规和安全风险。
解决这一问题的常见思路是检索增强生成(RAG)。在推理阶段,模型并不是单纯依赖自身记忆,而是实时从外部知识库或数据库中检索相关内容,再与内部能力结合生成回答。这样一来,模型的”静态知识”可以借助外部信息获得动态更新,从而避免因参数过时而导致的错误。
除了检索增强,研究者也在探索增量微调和模型编辑。前者通过小规模的追加训练,不断为模型补充新知识;后者则直接在参数空间里定点修改或插入事实。尽管这些方法在可扩展性和稳定性上仍有挑战,但它们代表了让模型知识与现实保持同步的重要方向。
知识老化是大模型与生俱来的问题,无法依靠一次性训练彻底解决。必须在系统设计里为智能体配置更新机制,让它能够随现实演化而不断”刷新”。只有这样,智能体才能在长期运行中保持可信与可用。
结论
AI智能体的十大关键问题从三个层面勾勒出完整的挑战图景。核心层决定其能否可靠,系统层决定其能否可控,外围层决定其能否持续。理解这些问题本身,远比幻想”万能模型”更为重要。只有将错误累积、算力瓶颈、工具依赖、目标对齐、可解释性、协作协议、环境适应、资源约束与知识更新等因素统筹纳入设计,智能体才能真正走向稳健与可持续的未来。

